Search Results
Real-time Grasp Planning based on Motion Field Graph for Human-Robot Cooperation
Dynamic Grasping with Reachability and Motion Awareness
Reachability Aware Grasping Video Full
GraspingRobot
Relaxed-Rigidity Constraints: In-Grasp Manipulation using Purely Kinematic Trajectory Optimization
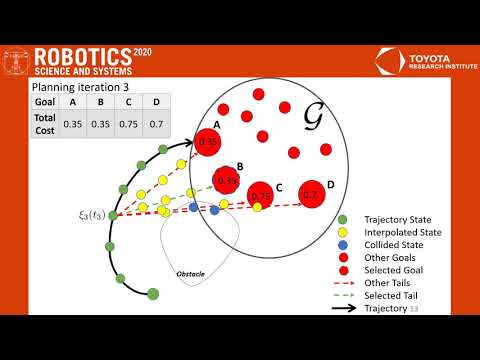
RSS 2020, Spotlight Talk 33: Manipulation Trajectory Optimization with Online Grasp Synthesis and...
Weiwei Wan - From human demonstration to automatic planning for robotic manipulation and assembly
Robotic Path Planning with Sparse Environment Representations
Optimization Model for Grasp Planning: A Simulation Demo.
Bench-MR: A Motion Planning Benchmark for Wheeled Mobile Robots (ICRA 2021)
VNAV19 Guest Lecture by Prof. John Leonard (MIT)
RSS 2017 - Optimal Shape and Motion Planning for Dynamic Planar Manipulation